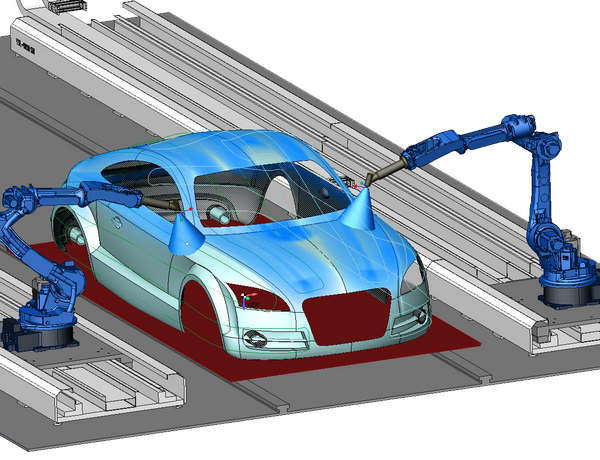
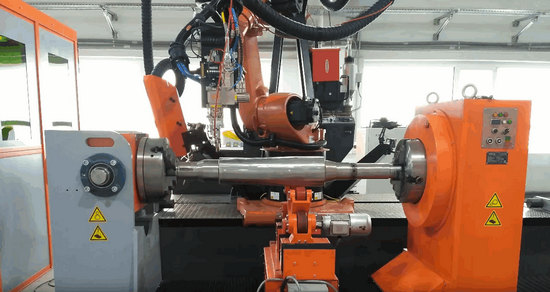
Для чего нужен промышленный робот?
Для чего нужен промышленный робот?
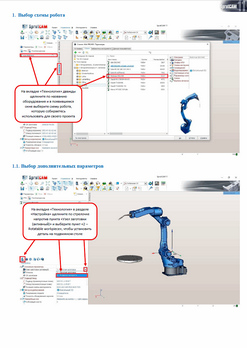
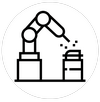
 В чем сложность программирования промышленных роботов?
В чем сложность программирования промышленных роботов?
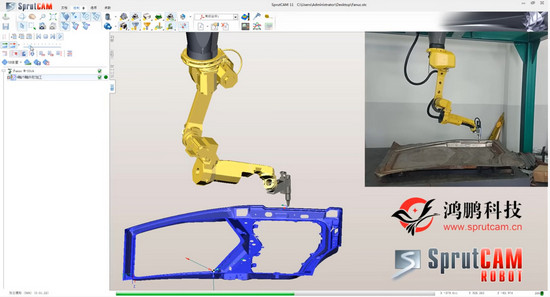
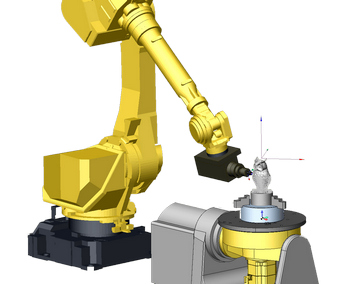
 Преимущества использования SprutCAM СПРУТКАМ Робот
Преимущества использования SprutCAM СПРУТКАМ Робот


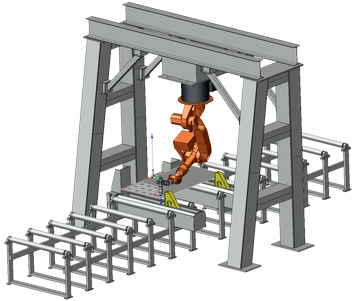

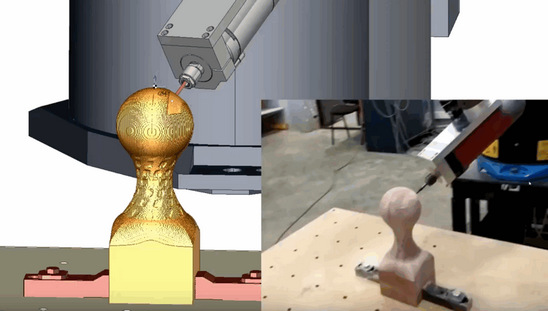
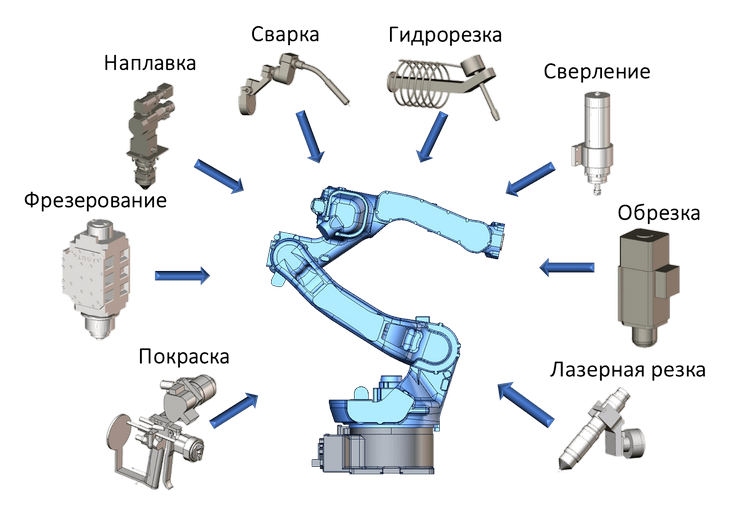
Фрезерование
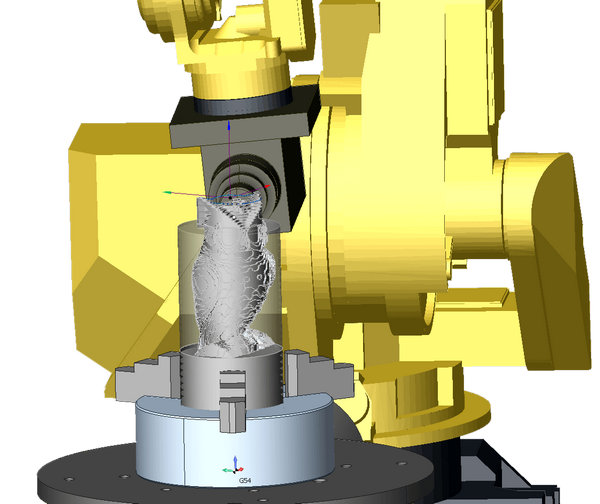
- Изготавливайте любые по форме детали: скульптуры, барельефы, ложементы, формы для литейной оснастки;
- Материалы: камень, дерево, пластик, пенопласт.
Обрезка
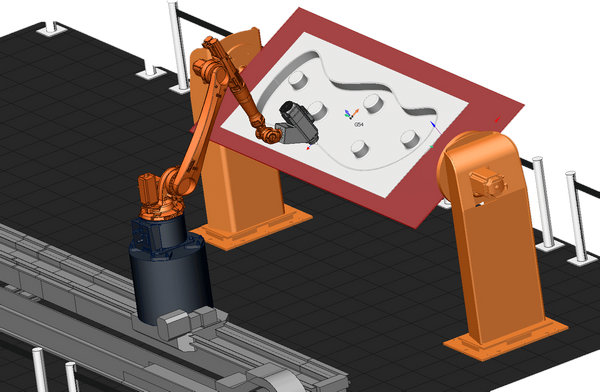
- Обрезку можно запрограммировать с использованием концевых, дисковых или фасонных фрез; ;
- Подходит для обрезки как плоских деталей, так и для имеющих сложную форму.
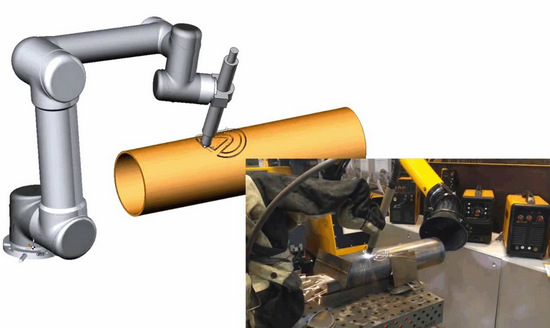
Сварка
- Автоматический расчёт наклона инструмента равноудаленно от свариваемых поверхностей;
- Сварка с использованием поворотных приспособлений для постоянной ориентации электрода над деталью;
- Управление 6-й осью робота позволяет всегда ориентировать сварочный узел вдоль траектории для использования машинного зрения.
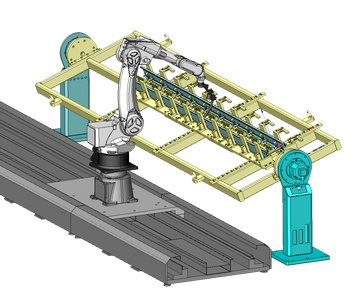
Резка
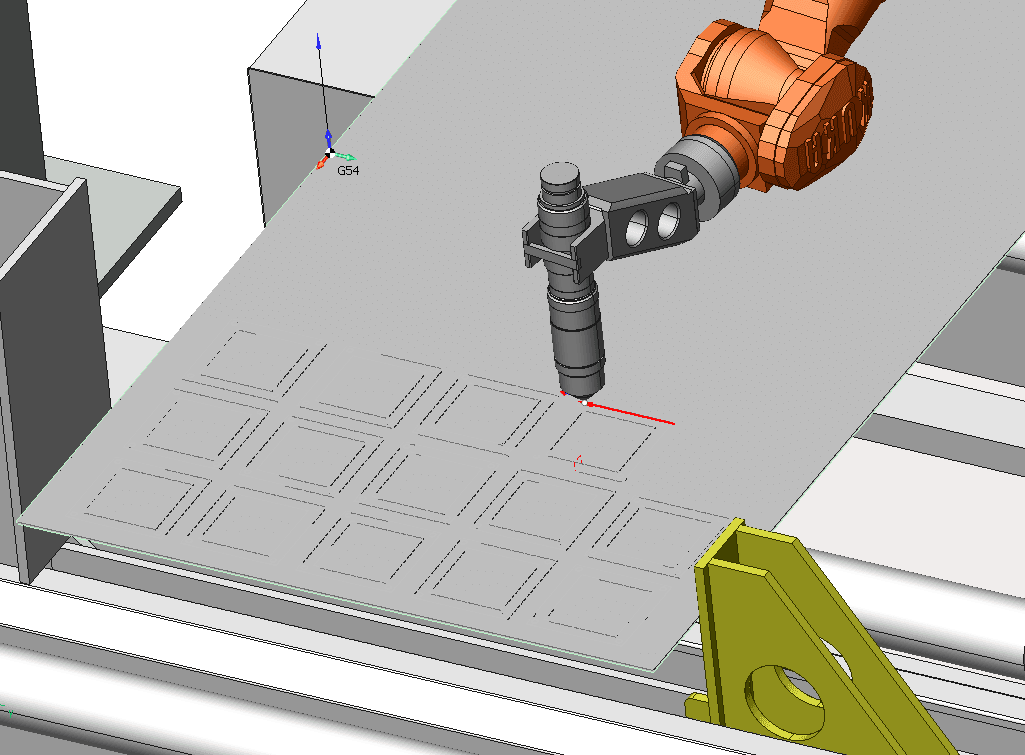
- Плазменная, лазерная, гидроабразивная, резка ножом;
- Возможность запрограммировать обработку как плоских, так и криволинейных деталей;
- Программирование учитывает параметры резки: ширина реза, высота заготовки, скорость резания, давление воды, торможение в углах траектории.
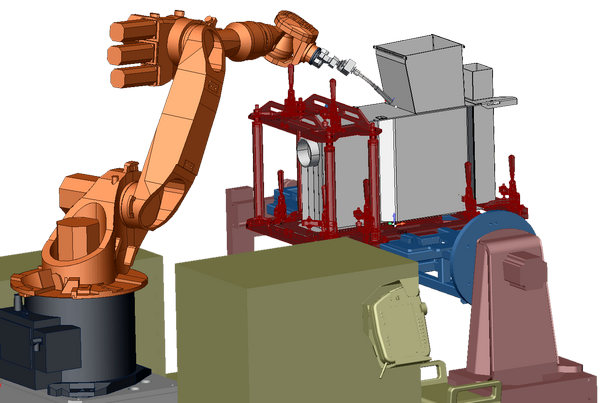
Наплавка
- Поддержка 3d печати и технологии прямого лазерного выращивания;
- Используйте как для ремонта и восстановления деталей, так и для выращивания деталей с нуля.
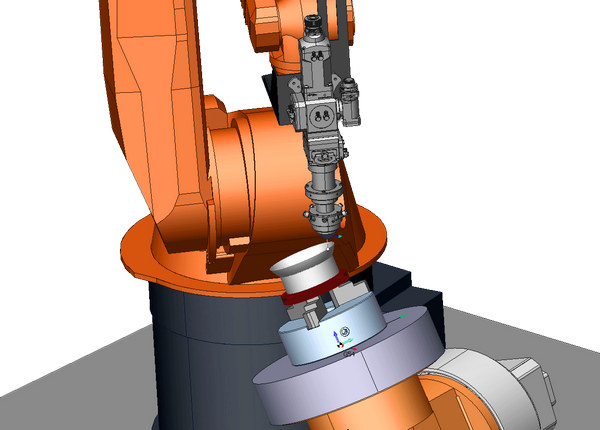
Шлифование
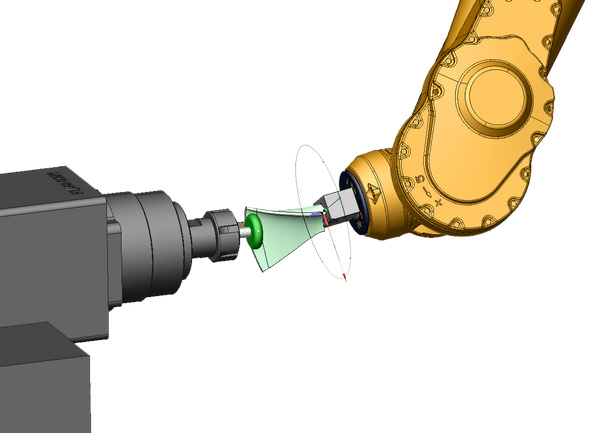
Покраска