Как программировать сложное оборудование?
В настоящее время предприятия отдают предпочтение все более сложным схемам станков. Цель проста – изготовить сложную деталь за одну операцию. Но за выигрыш в производительности приходится платить растущей сложностью управляющих программ. И здесь на помощь приходит отечественная система SprutCAM. Мощные инструменты моделирования позволяют программировать станки практически любой сложности, а широкий функционал – осуществить подготовку УП для различных групп оборудования в одной программе.
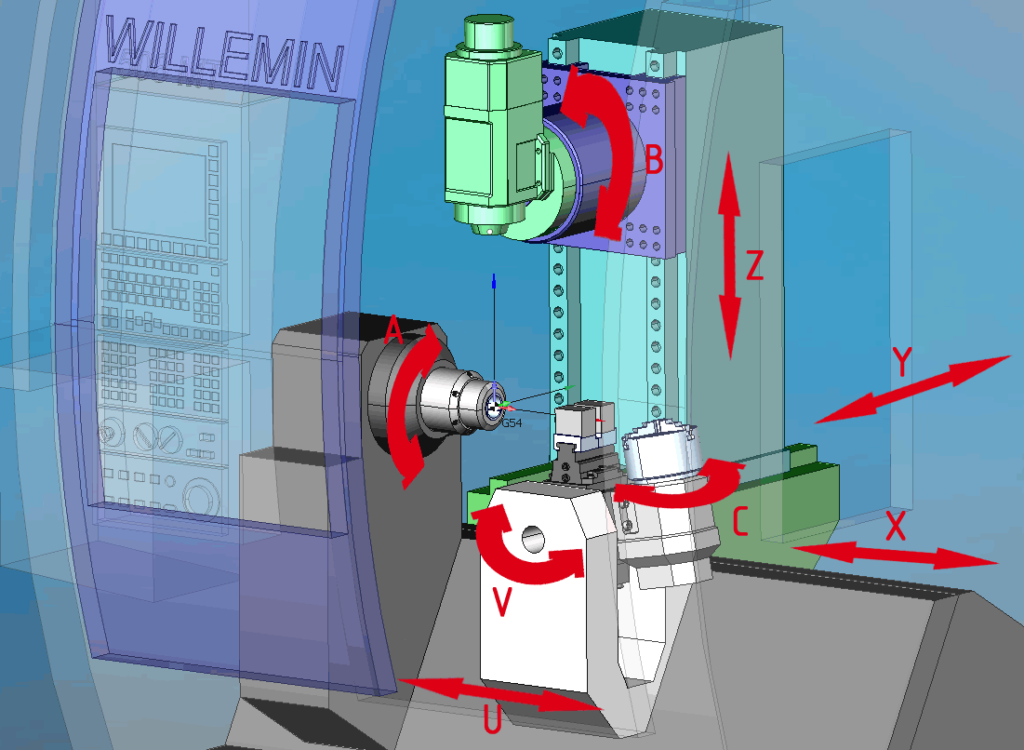
Рис. 1. Схема станка Willemin Macodel 508MT в SprutCAM
Как задействовать все возможности станка
Ярким примером такого современного многофункционального оборудования может служить станок Willemin Macodel 508MT (рис. 1). Одной из его особенностей является многопозиционный револьвер. Поворачиваясь в различные положения, он может использоваться как противошпиндель, как задний центр, как тиски для поддержки или независимой обработки детали (рис. 2). Инструментальный шпиндель также имеет поворотную ось B и может использоваться как для токарной, так и для фрезерной обработки. В результате количество управляемых осей данного станка достигает 8.
С какими же проблемами сталкивается технолог при программировании такого станка? Во-первых, это определение положения инструмента в системе координат заготовки. Ведь заготовка в процессе обработки может быть установлена в шпинделе, тисках или противошпинделе, а также повернута на произвольный угол вместе с револьвером. При повороте инструментального шпинделя разворачивается и система координат. В результате управляющая траектория должна быть рассчитана в наклоненной плоскости с учетом всех перемещений.
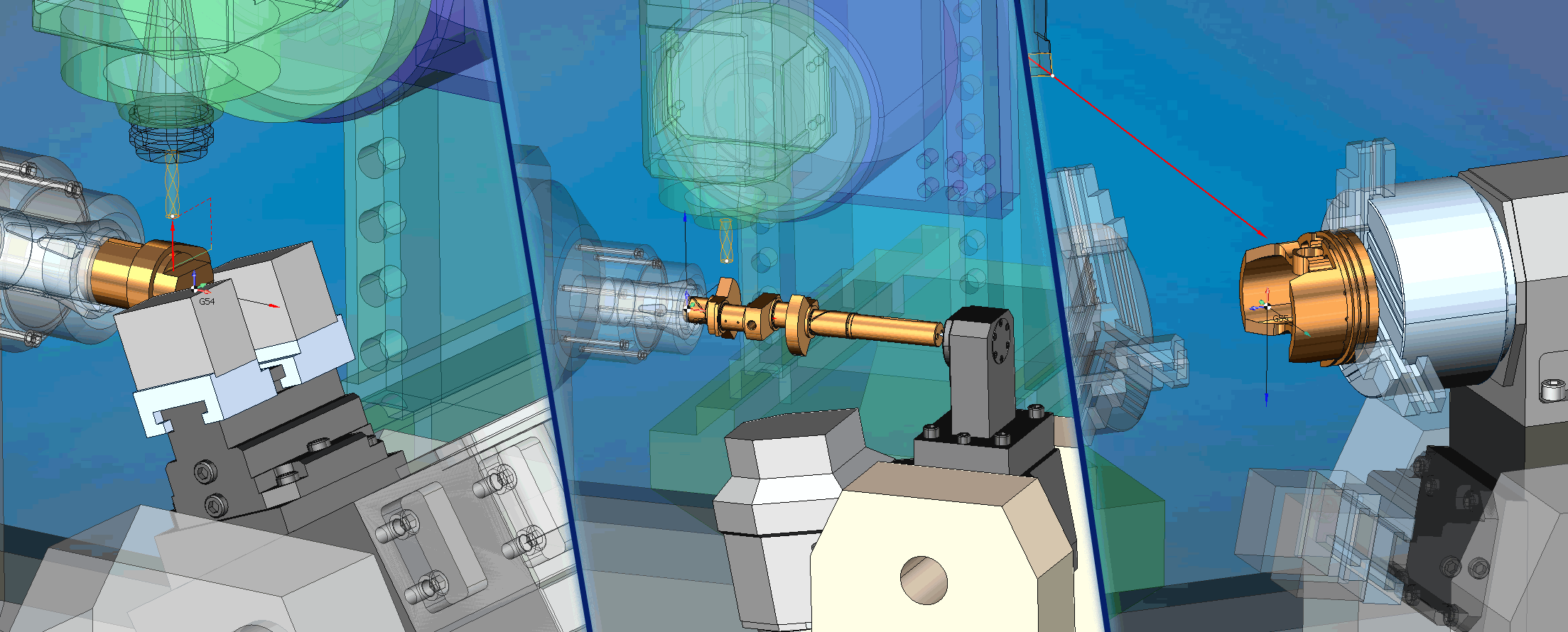
Рис. 2. Обработка с поддержкой тисками, с использованием заднего центра, в противошпинделе
Во-вторых, станок имеет достаточно «тесную» рабочую зону. Поэтому особенно остро стоит проблема столкновений узлов станка, заготовки, инструмента и элементов оснастки в различных комбинациях.
В SprutCAM эти задачи решаются следующим образом: создается виртуальная модель оборудования. Она представляет собой кинематическую схему, в которой с каждым узлом станка связана трехмерная модель. На этой модели производится виртуальная обработка детали. Кинематическая схема берет на себя часть функций технолога: рассчитывает наклоны и смещения систем координат (рис. 3), контролирует пределы перемещений по осям, учитывает правила отхода в точку смены инструмента. С такой виртуальной моделью программирование сложного оборудования сводится к простым операциям.
Алгоритмы системы в совокупности с кинематической схемой и отлаженным постпроцессором автоматически генерируют управляющую программу. Такая УП надежна, потому что полностью повторяет процесс обработки, смоделированный технологом.
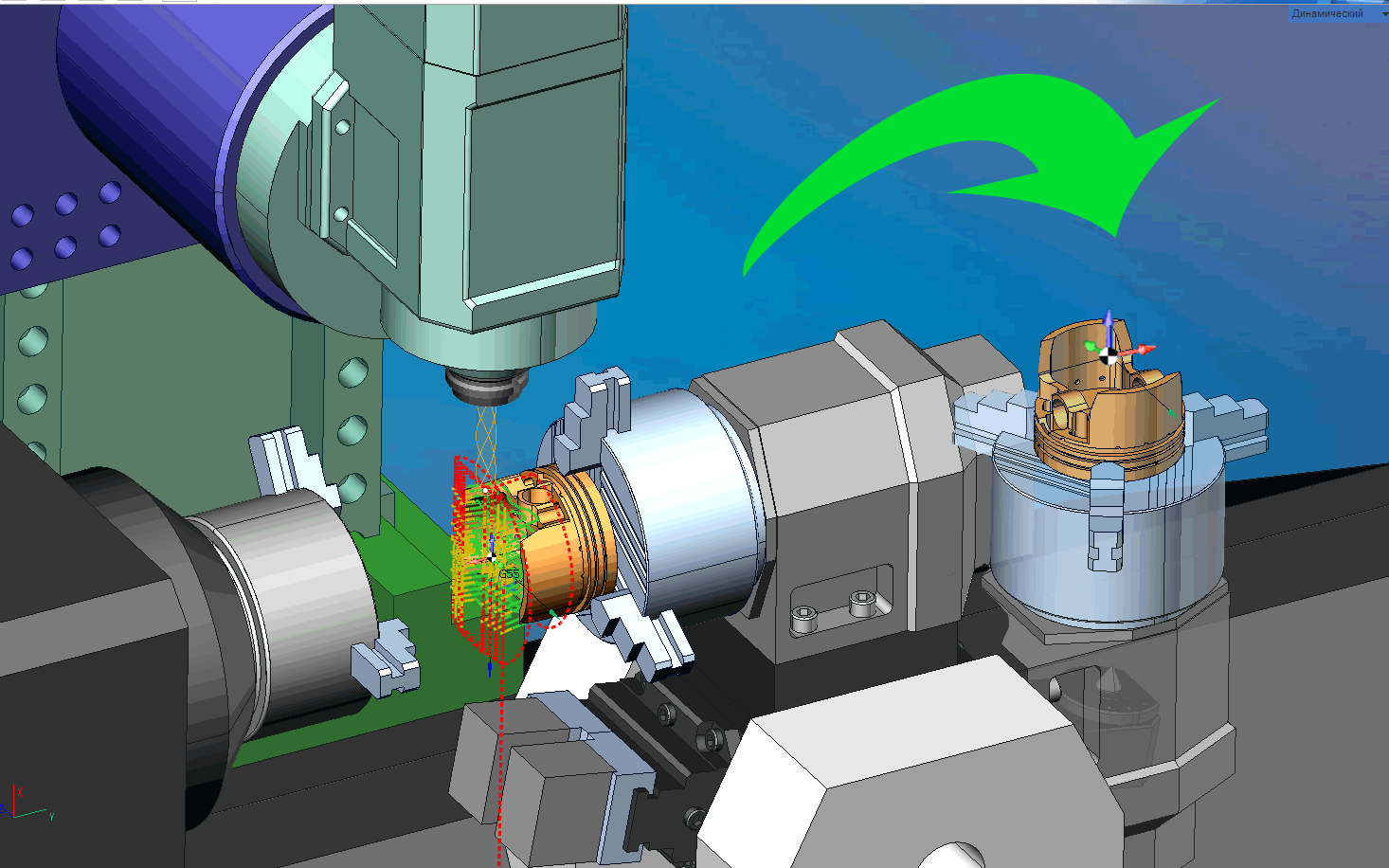
Рис. 3. Разворот противошпинделя в вертикальную позицию
Широкий спектр оборудования
Аналогичный подход используется при разработке управляющих программ для других сложных схем оборудования. Например, на рис. 4 показаны: токарно-фрезерный станок с двумя револьверами, пятиосевой фрезерный станок, токарный автомат и промышленный робот с семью осями.

Рис. 4. Виртуальные модели оборудования в SprutCAM
Раскройте весь потенциал своего оборудования и перейдите на выполнение более сложных заказов!
Николай Александрович Романов, Александр Валерьевич Частухин, ООО «Центр СПРУТ-Т», г. Москва (495) 181-00-13 www.сsprut.ru